Index
- What is a ROS?
- Benefits of utilizing systems incorporating ROS/ROS 2
- Effective autonomous control system development solutions utilizing ROS/ROS 2
- Services provided by eSOL
- Application examples
- Development results
- Distributed processing framework
This enables construction of scalable application systems, from single-processor through to multiple processor configurations. - Extensive libraries
Extensive robotics libraries available, including recognition algorithms and navigation functionality created in the field of robotics. - High-performance development tools
High-performance development tools available, such as those for simulation, route planning, visualization, and data-logging. - Automotive equipment
- Mobility equipment
- Manufacturing equipment
- Medical equipment
- Health care products
What is a ROS?

ROS (Robot Operating System) is an open source (OSS) application framework for robotics. The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project. ROS uses by default Ubuntu, a Linux-based OS as its standard environment, and this is widely used worldwide in the field of robot research and development.

ROS 2 takes on-board the main concepts of ROS, and development is proceeding through the addition of concepts required for commercialization and practical implementation—these include multi-platform support, real-time control, enhanced fault-tolerance, and support for multiple robots, including for embedded devices. Communications middleware employs high-reliability DDS (Data Distribution Service) and RTPS (Real-Time Publish-Subscribe) field-proven protocols, including in military ships, aerospace systems, and financial systems.
Features
Features
Back to top
Benefits of incorporating ROS/ROS 2
- Provide sophisticated embedded systems using rich ROS/ROS 2 software resources
- Take advantage of distributed systems for efficient development of complex embedded systems
- Expand the scope of application of ROS/ROS 2 to the embedded market, making a wide variety of robot products a reality
| eSOL supports the use of the rich functionality provided by ROS/ROS 2, as well as applications using it, and commercialization of ROS/ROS 2 in a range of embedded systems. |
Back to top
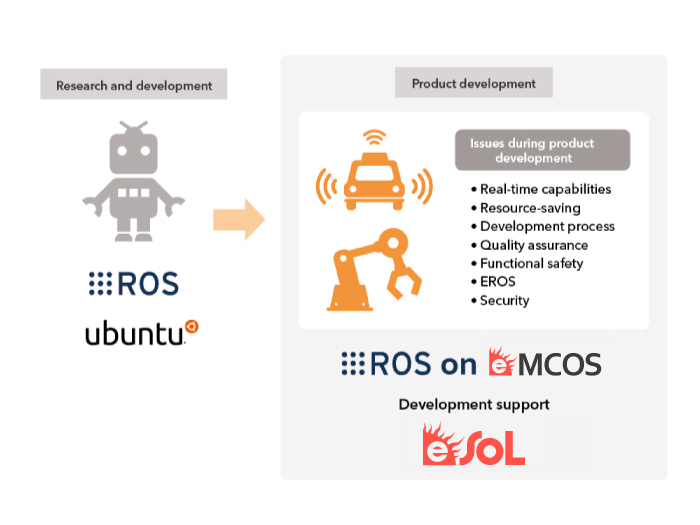
Effective autonomous control system development solutions utilizing ROS/ROS 2
This uses the "ROS on eMCOS®" scalable embedded platform supporting ROS/ROS 2, and in addition to the development of efficient autonomous control robots and autonomous driving systems, this provides an ROS execution environment for embedded systems that can be applied to product development.
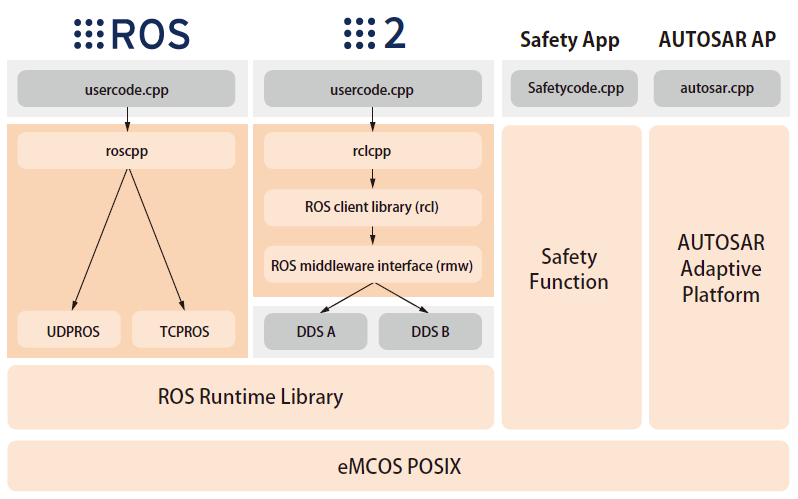
ROS on eMCOS

Taking advantage of the POSIX compliance of eSOL’s scalable RTOS, eMCOS POSIX provides a suitable production-ready ROS-based execution environment for embedded systems.
Important features include:
- Employ the eMCOS distributed microkernel architecture, and provides scalable support from single-core to multi/many-core processors as well as multichip.
- Enable usage of rich software resources in embedded processors, without needing to change the ROS/ROS 2 build system
- Provide real-time OS-specific features
- Lightweight, real-time threading
- Separation of system safety and non-safety systems
- Message-passing optimized for hardware configurations
- Linkage with other systems, such as in-vehicle systems
Back to top
Products and services provided by eSOL
We provide strong support for the commercialization of high-reliability robot systems with a view to ensuring quality and supporting functional safety, by providing ROS/ROS 2 engineering services that utilize our rich experience and knowledge, and software platform technologies centered around the eMCOS real-time operating system suited to autonomous distributed cooperative systems.
- ROS/ROS 2 engineering services
- ROS/ROS 2 application development
- Integration of ROS/ROS 2 with existing systems
- Robot control device driver development
- SLAM prototype development using commercially available robots
- Research and development of embedded ROS
- Construction of application SDK using characteristics of ROS/ROS 2
- Providing an eMCOS-based platform with high affinity with ROS/ROS 2
Back to top
Application examples
ROS 2 on Renesas RX65N
Robot demonstration using GR-ROSE and AWS cloud service with ROS 2
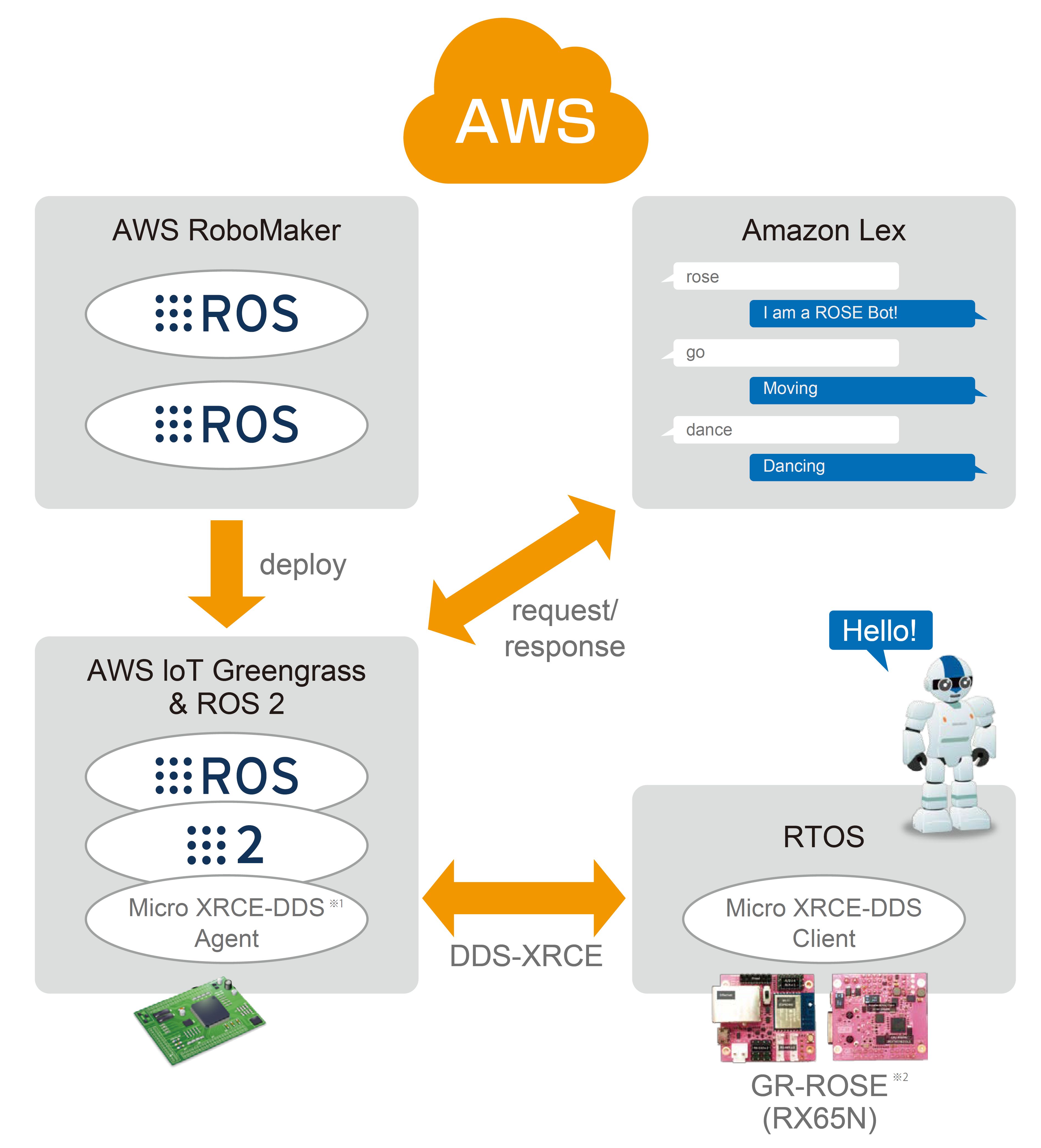
- Micro XRCE-DDS : eProsima DDS-XRCE compliant software
- GR-ROSE : "RX65N" development board by Renesas company
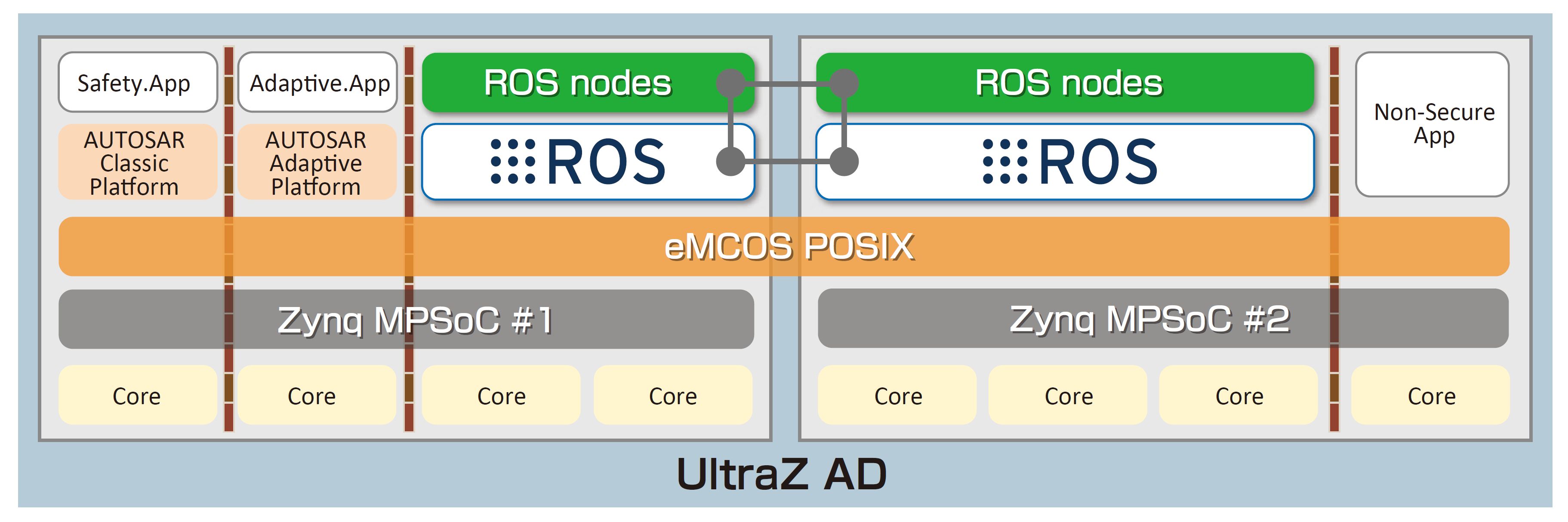
ROS on eMCOS for UltraZ AD development board featuring two Xilinx Zynq UltraScale+ MPSoC Chips
ROS/ROS 2 optimized for advanced autonomous driving is implemented on UltraZ AD board running on eSOL’s scalable real-time OS "eMCOS". eMCOS provides a safe and secure system that completely separates applications with different safety requirement
Back to top
Development results
- Microcontroller node development (RX MCU, rosserial)
- Personal mobility development (Navigation Stack)
- Infrastructure inspection robot development (OpenRAVE, rqt)
- Autonomous mobile robot development (Navigation Stack, Perception)
- Autoware environment construction for autonomous driving (Camera Driver, Localization, Perception)
- Sensor device ROS evaluation environment construction (3D LiDAR, Point Cloud, CAN)
- Environment construction for bridge with Windows PC (MATLAB / Simulink, MoveIt! Bridge)
Back to top
Related Materials
|

|

|
|
Related Videos
Autoware.Universe on eMCOS demo |

YOLO object detection with AI accelerator demo |
The application of the parallelization tool for the ROS 2 autonomous driving node |
