Index
- ROS是什么
- 将ROS/ROS 2应用到嵌入式系统的优点
- 利用ROS/ROS 2的高效自主控制系统开发解决方案
- eSOL提供的产品和服务
- 应用事例
- 开发实绩
- 相关资料
- 分散处理架构
从单一处理器构成到多处理器构成,均可对应用程序系统进行扩展性构建 - 丰富的库群
可使用面向机器人学的丰富库群,如在机器人领域诞生的识别算法及导航功能等 - 高功能的开发工具
可使用模拟、路径规划、可视化、数据记录等高功能开发工具 - 车载设备
- 移动出行设备
- 制造装置
- 医疗设备
- 保健产品
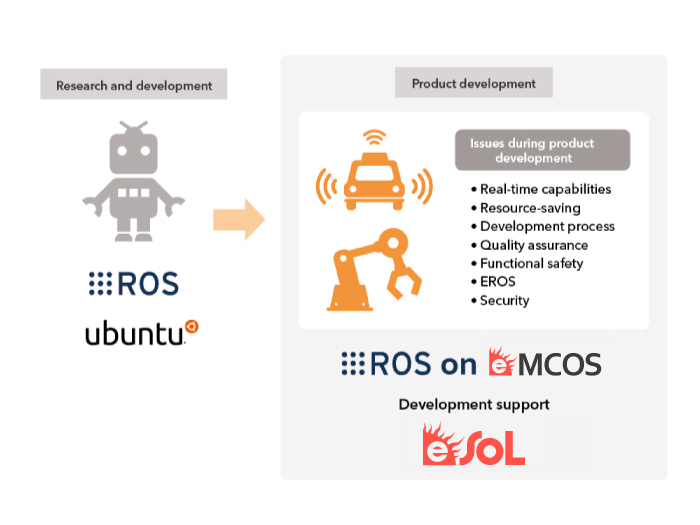
ROS是什么

ROS(Robot Operating System)是开放源代码(OSS)的机器人应用程序架构。其设计适合构建高功能机器人控制所要求的分布式系统,可以灵活且轻易地变更系统构成。ROS以UNIX系列操作系统的Ubuntu作为标准环境,被广泛应用到全球机器人的研究开发领域。

ROS 2的开发过程继承了ROS的主要理念,同时加入了实现商用化和实用化所需要的理念,如:包括嵌入式设备在内的多平台化、实时控制、提高容错性、应对多个机器人等。通信中间件已被采用到军用系统、航空航天系统、金融系统等上面,采用了具有高可靠性的DDS(Data Distribution Service)及RTPS(Real-Time Publish-Subscribe)协议。
特点
期待可支持ROS/ROS 2的市场
Back to top
将ROS/ROS 2应用到嵌入式系统的优点
- 使用丰富的ROS/ROS 2软件资产,实现嵌入式产品的高功能化
- 有效利用分散系统的优势,高效开发复杂化的嵌入式系统
- 将ROS/ROS 2的适用范围扩展到嵌入式领域,制作出多种多样的机器人产品
| 有效利用ROS/ROS 2提供的丰富功能,eSOL为将ROS/ROS 2应用到各种嵌入式系统上以及实现商业化提供支援。 |
Back to top
利用ROS/ROS 2的高效自主控制系统开发解决方案
有效利用符合ROS/ROS 2的可扩展嵌入式平台“ROS on eMCOS®”,实现高效自主控制机器人及自动驾驶系统的开发,并面向可适用产品开发的嵌入式系统,提出ROS执行环境方案。
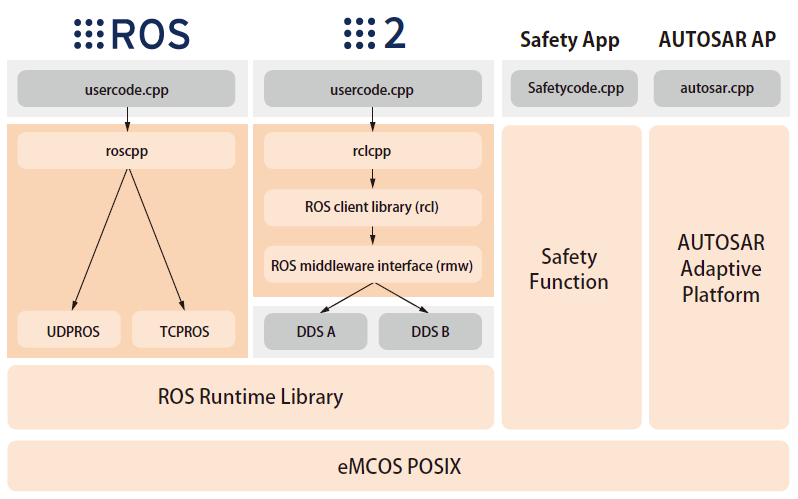
ROS on eMCOS

通过使用符合POSIX规格的可扩展实时操作系统“eMCOS POSIX”,面向可适用于产品开发的嵌入式系统,实现ROS执行环境
- 采用分散型微内核架构,从单核到多核、众核处理器、多芯片,支持可扩展性
- 不变更ROS/ROS 2的构建系统,通过嵌入式处理器即可使用丰富的软件资产
- 提供实时操作系统固有的功能
- 轻量实时线程
- 安全系统和非安全系统的分离
- 硬件构成中优化的消息包
- 与车载系统等其他系统的协作
Back to top
eSOL提供的产品和服务
通过提供具有丰富的经验和知识的ROS/ROS 2工程服务以及最适合自主分散协调系统的实时操作系统“eMCOS”为中心的软件平台技术,为包括确保质量及功能安全应对等在内的具有高可靠性的机器人系统的产品化提供强力支援。
- 关于ROS/ROS 2的工程服务
- ROS/ROS 2应用程序开发
- ROS/ROS 2与现有系统的整合(集成)
- 机器人控制用设备驱动的开发
- 使用市售机器人的SLAM等的试制开发
- 嵌入式用ROS的研究开发
- 构建有效利用ROS/ROS 2优点的应用程序用SDK
- 以高度兼容ROS/ROS 2的eMCOS为基础提供平台
Back to top
应用事例
ROS 2 on Renesas RX65N
使用支持ROS 2的GR-ROSE和AWS云服务的机器人控制
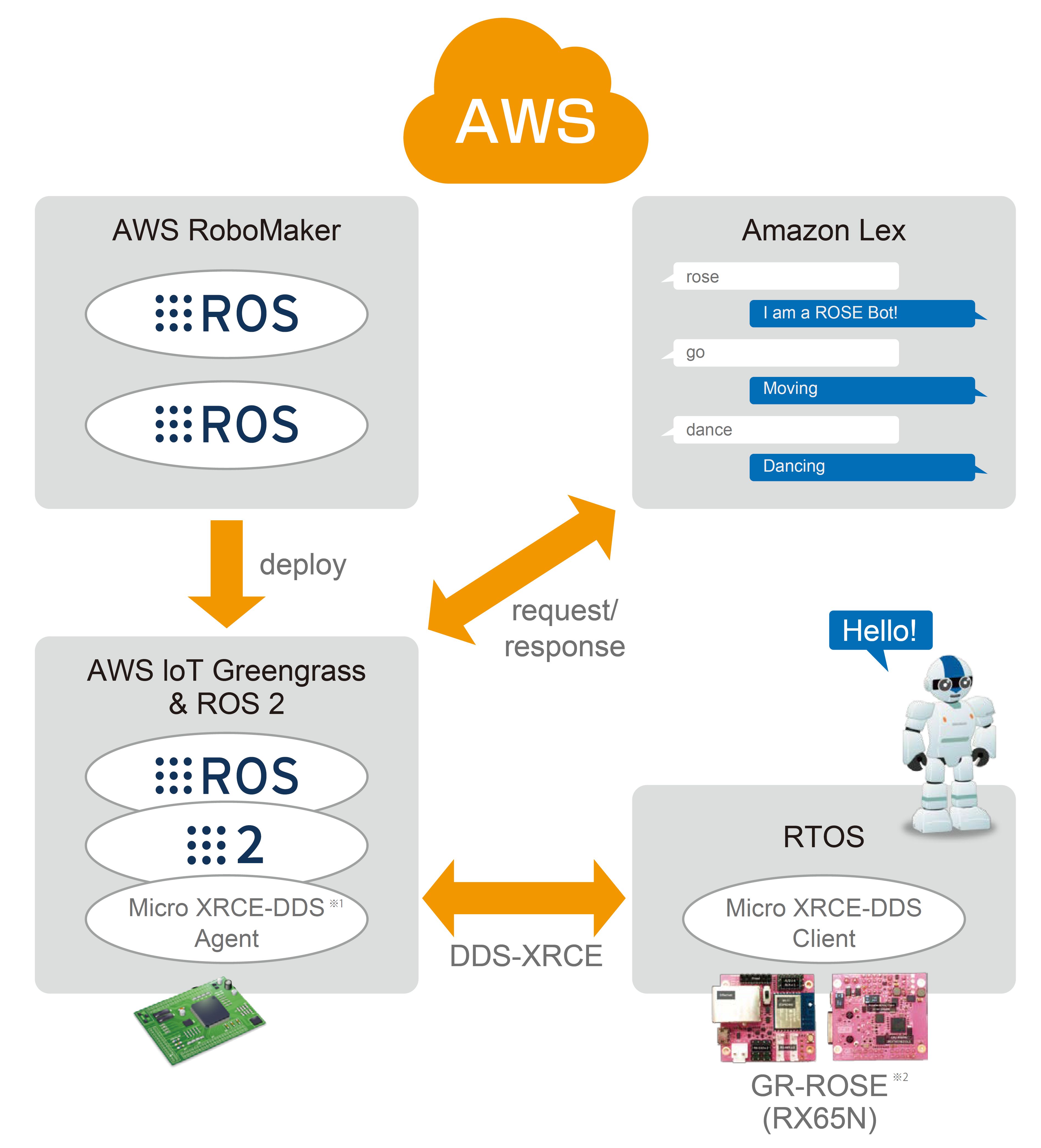
- Micro XRCE-DDS:eProsima公司制 支持DDS-XRCE的软件
- GR-ROSE:搭载“RX65N”的 CORE公司制开发板
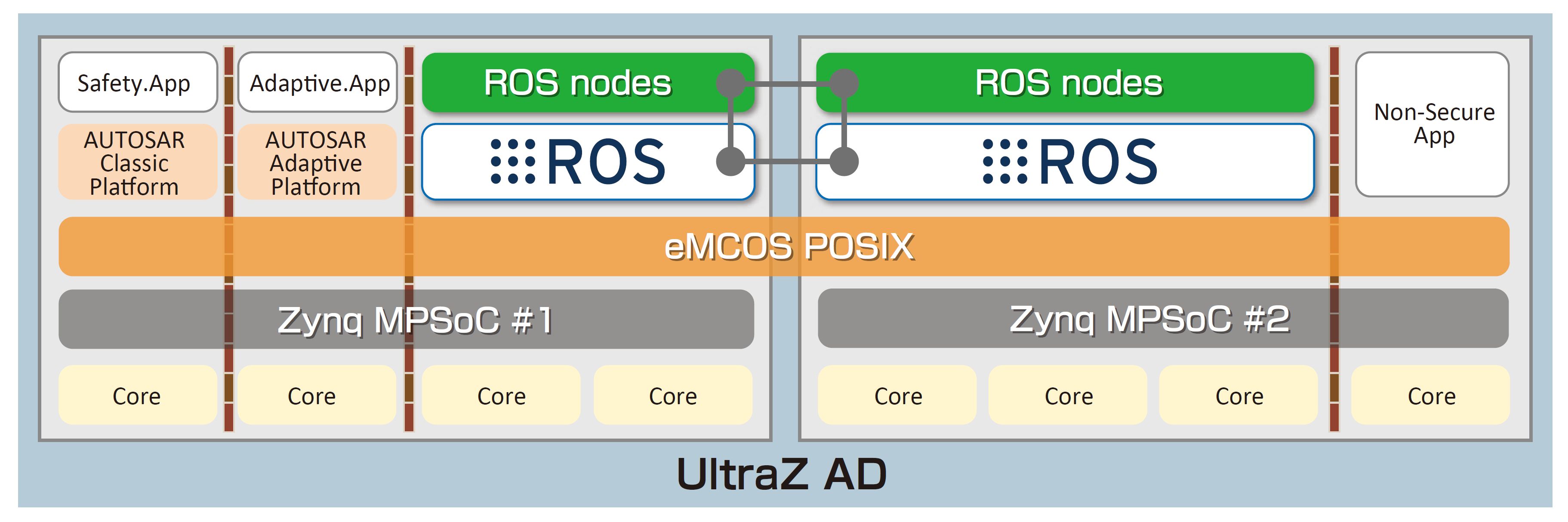
ROS on eMCOS×Zynq UltraScale+ MPSoC搭载 UltraZ AD
将最适合高度自动驾驶系统的ROS/ROS 2 安装到可扩展实时操作系统“eMCOS”动作的UltraZ AD板上。为构建通过eMCOS对可靠性不同的应用程序进行完全分离的、稳固安全的系统提供支援
Back to top
开发实绩
- 开发微控制器节点(RX MCU, rosserial)
- 开发个人移动出行设备(Navigation Stack)
- 开发基础设施检查机器人(OpenRAVE, rqt)
- 开发自主移动机器人(Navigation Stack, Perception)
- 构建自动驾驶用Autoware环境(Camera Driver, Localization, Perception)
- 构建传感器设备的ROS评估环境(3D LiDAR, Point Cloud, CAN)
- 构建与Windows PC的桥接环境(MATLAB/Simulink, MoveIt! bridge)
Back to top
资料下载

|

|

|
|
视频
Autoware.Universe on eMCOS demo |

YOLO object detection with AI accelerator demo |
The application of the parallelization tool for the ROS 2 autonomous driving node |
